15,949,686 members
Sign in
Sign in
Email
Password
Forgot your password?
Sign in with
home
articles
Browse Topics
>
Latest Articles
Top Articles
Posting/Update Guidelines
Article Help Forum
Submit an article or tip
Import GitHub Project
Import your Blog
quick answers
Q&A
Ask a Question
View Unanswered Questions
View All Questions
View C# questions
View C++ questions
View Javascript questions
View Visual Basic questions
View .NET questions
discussions
forums
CodeProject.AI Server
All Message Boards...
Application Lifecycle
>
Running a Business
Sales / Marketing
Collaboration / Beta Testing
Work Issues
Design and Architecture
Artificial Intelligence
ASP.NET
JavaScript
Internet of Things
C / C++ / MFC
>
ATL / WTL / STL
Managed C++/CLI
C#
Free Tools
Objective-C and Swift
Database
Hardware & Devices
>
System Admin
Hosting and Servers
Java
Linux Programming
Python
.NET (Core and Framework)
Android
iOS
Mobile
WPF
Visual Basic
Web Development
Site Bugs / Suggestions
Spam and Abuse Watch
features
features
Competitions
News
The Insider Newsletter
The Daily Build Newsletter
Newsletter archive
Surveys
CodeProject Stuff
community
lounge
Who's Who
Most Valuable Professionals
The Lounge
The CodeProject Blog
Where I Am: Member Photos
The Insider News
The Weird & The Wonderful
help
?
What is 'CodeProject'?
General FAQ
Ask a Question
Bugs and Suggestions
Article Help Forum
About Us
Search within:
Articles
Quick Answers
Messages
Teach a Robot to Walk Deep Reinforcement Learning
0
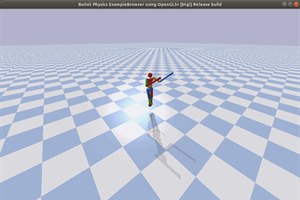
Teaching a Robot to Walk with AI - Introduction to Continuous Control Environments
In this article, we set up with the Bullet physics simulator as a basis for doing some reinforcement learning in continuous control environments.
Added 28 Sep 2020
1
Teaching a Robot to Walk with AI and PyBullet Environments
In this article, we look at two of the simpler locomotion environments that PyBullet makes available and train agents to solve them.
Added 28 Sep 2020
2
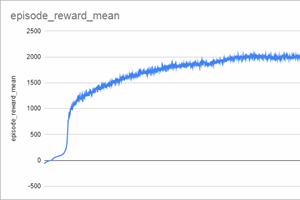
Training a Humanoid AI Robot to Walk Using Proximal Policy Optimisation (PPO)
In this article in the series we start to focus on one particular, more complex environment that PyBullet makes available: Humanoid, in which we must train a human-like agent to walk on two legs.
Added 29 Sep 2020
3
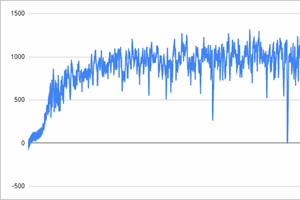
Training a Humanoid AI Robot to Walk With Soft Actor Critic (SAC)
In this article we will adapt our code to train the Humanoid environment using a different algorithm: Soft Actor-Critic (SAC).
Added 30 Sep 2020
4
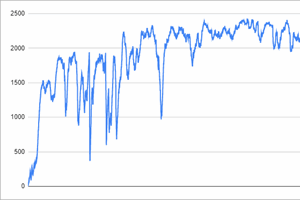
Training a Humanoid AI Robot to Run Backwards
In this article we will try to train our agent to run backwards instead of forwards.
Added 1 Oct 2020
5
Training a Humanoid AI Robot to Run With a Custom Model
In article in this series we will look at even deeper customisation: editing the XML-based model of the figure and then training the result.
Added 2 Oct 2020
Delete Item
Are you sure you want to remove
from
?